OpenCV ROS 환경에서 구동
1.1 ros-melodic 환경에서 opencv apps와 opencv 관련 패키지를 설치하는 코드입니다.
$ sudo apt install ros-melodic-opencv-apps $ sudo apt install ros-melodic-cv-*
1.2 roscore를 실행하고 카메라를 킵니다.
$ roscore $ rosrun cv_camera cv_camera_node
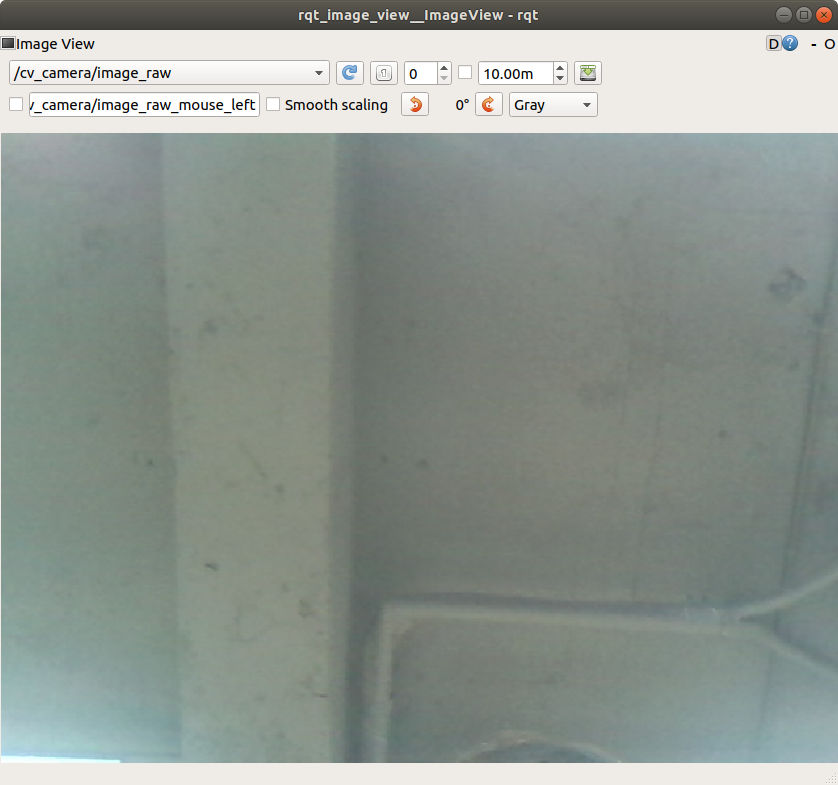
1.3 rqt 이미지 뷰어를 실행합니다.
rqt_image_view
1.4 창이 뜨는것을 확인하고 카메라 데이터를 전송하는 토픽인 image_raw를 선택하여 이미지가 뜨는지 확인합니다.
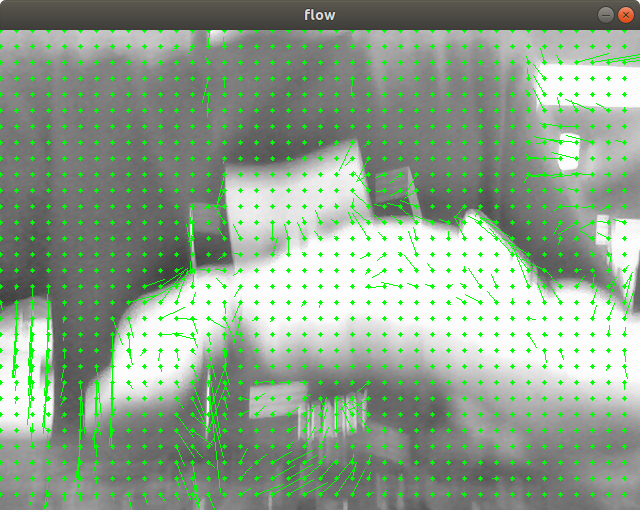
1.5 이미지에서 움직임을 시각화해주는 어플리케이션을 실행해 볼 수 있습니다.
$ roslaunch opencv_apps fback_flow.launch image:=/cv_camera/image_raw
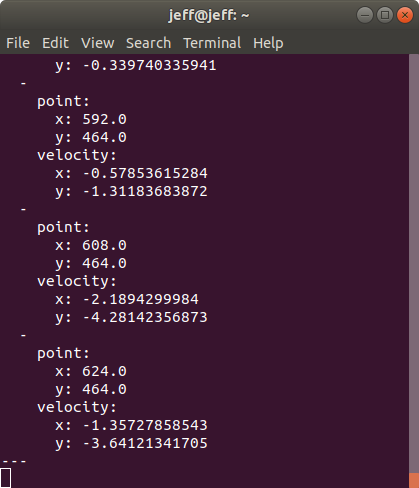
1.6 로스토픽 에코 명령어를 통해 플로우의 데이터 값을 출력 시킬 수 있습니다.
$ rostopic echo /fback_flow/flows
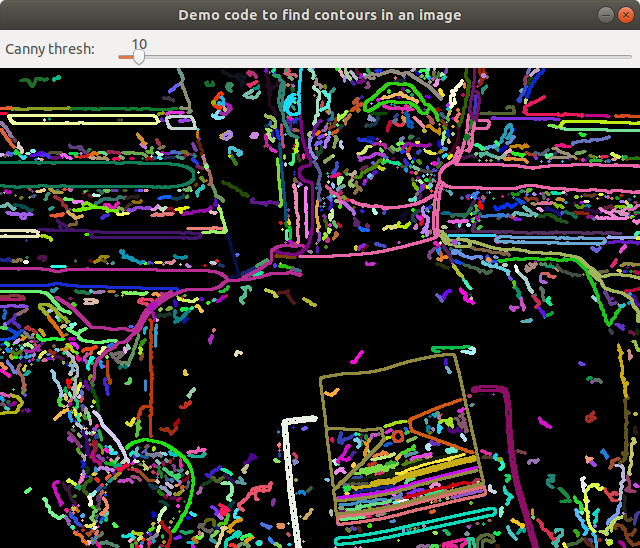
기타 여러가지 어플리케이션 실행 명령어
$ roslaunch opencv_apps edge_detection.launch image:=/ cv_camera/image_raw edge_type:=1 $ roslaunch opencv_apps hough_lines.launch image:=/ cv_camera/image_raw hough_type:=1 $ roslaunch opencv_apps find_contours.launch image:=/ cv_camera/image_raw $ roslaunch opencv_apps face_detection.launch image:=/ cv_camera/image_raw $ roslaunch opencv_apps people_detect.launch image:=/ cv_camera/image_raw $ roslaunch opencv_apps fback_flow.launch image:=/ cv_camera/image_raw
엣지검출 알고리즘
허프라인검출 알고리즘
이상한 알고리즘..?
얼굴인식 알고리즘
사람인식 알고리즘
움직임 인식 알고리즘
<참고문헌 및 출처>
PinkWink/urdf_exam
Contribute to PinkWink/urdf_exam development by creating an account on GitHub.
github.com
'Autonomous Vehicle > ROS programming' 카테고리의 다른 글
| ROS에서 Package 생성하기 (0) | 2020.08.12 |
|---|---|
| 특강 5,6,7일차 : JETBOT 딥러닝 자율주행 따라하기 (5) | 2020.08.08 |
| 특강 2일차 : Roslaunch에 대한 이해 (0) | 2020.07.24 |
| 특강 2일차 : ROS Package 만들기 (0) | 2020.07.24 |
| 특강 1일차 : ROS 에 대한 이해 (0) | 2020.07.23 |



